
[AI 리뷰] 인간과 로봇이 교감하는 인공지능 기반 '인공피부' 개발...촉각넘어 위험물질 탐지까지
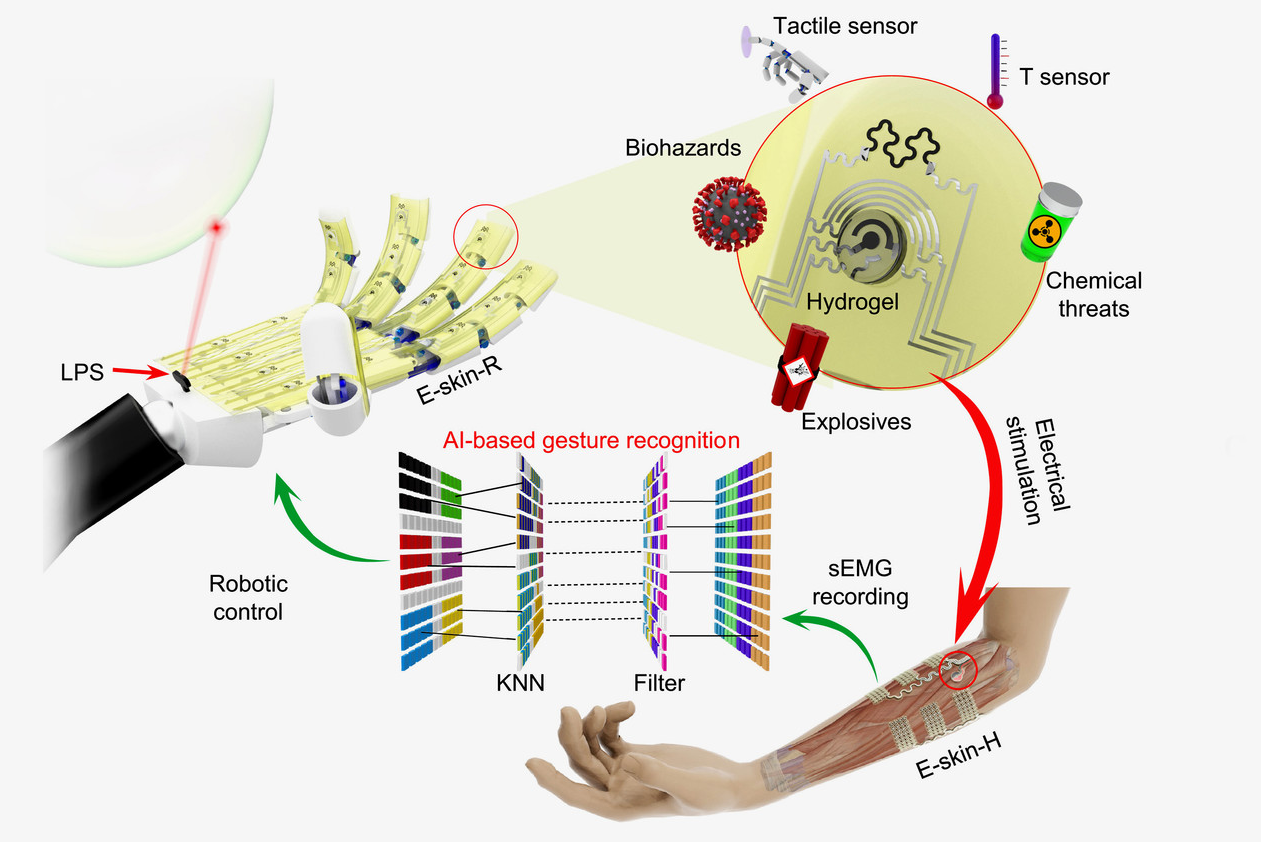
캘리포니아공대 연구팀, 인공피부를 ‘로봇 팔’과 ‘사람의 피부’에 부착하는 센서와 통합...머신러닝을 사용하여 이러한 신호를 로봇 제어를 위한 제스처로 변환하고 6가지 제스처로 모델을 학습

우리는 일상적인 상황에서 촉각을 너무나 당연하게 여기는 경향이 있지만 인간의 촉각과 감각기능은 주변 환경과 상호 작용하는 능력에 매우 중요하다.
예를 들어, 아침 식사로 계란을 요리하기 위해 냉장고에 손을 넣어 계란을 집는다면 계란이 차갑고 껍질이 매끄러운 것을 느낄 수 있으며, 부서지지 않도록 얼마만큼의 세기로 잡아야 하는지 알 수 있다. 이는 인간이 직접 제어하는 로봇에서는 매우 어려움을 겪을 수 있는 촉각 능력이다.
여기에, 캘리포니아 공과대학교(Califonia Institute of Technology. 이하, 칼텍·Caltech) 연구팀이 개발한 새로운 인공피부는 이제 로봇이 간단한 터치를 통해 온도, 압력 및 독성 화학물질까지 감지할 수 있는 기능을 제공한다.
이 새로운 기술은 인공피부를 ‘로봇 팔’과 ‘사람의 피부’에 부착하는 센서와 통합하는 로봇 플랫폼의 일부이다. 이 두 가지를 인공지능(AI) 머신러닝으로 인터페이스 시켜 인간 사용자는 자신의 피부를 통해 피드백을 받으면서 자신의 움직임으로 로봇을 제어할 수 있는 것이다.
'M-Bot'이라고 불리는 이 멀티모달 로봇 감지 플랫폼은 칼텍 의학공학과 조교수이자 헤리티지 의학연구소(Heritage Medical Research Institute)의 웨이 가오(Wei Gao)교수의 주도로 개발되었다. 그것은 인간에게 로봇에 대한 더 정확한 통제권을 주는 동시에 잠재적인 위험으로부터 인간을 보호하는 것을 목표로 한다.
가오 교수는 "현대 로봇들은 보안, 농업, 의료, 제조업 등에서 점점 더 중요한 역할을 하고 있습니다"라며, "우리는 이 로봇들에게 촉감과 온도감을 줄 수 있을까? 또한, 그들이 폭발물이나 신경작용제와 같은 화학물질이나 전염성 박테리아나 바이러스와 같은 생물학적 위험을 감지하도록 만들 수 있을까? 라는 명제 하에 우리는 이 시스템을 개발했습니다"라고 밝혔다.
인간의 손과 로봇 손을 나란히 비교하면 확연한 차이가 드러나지만 연구팀이 개발한 인쇄 가능한 인공피부의 물성은 젤라틴(젤리같은) 하이드로겔(Gelatinous Hydrogel)로 로봇의 손끝을 인간의 손끝과 훨씬 더 비슷하게 구현했다.
그 하이드로겔 안에는 인공피부에 주변의 세계를 감지할 수 있는 능력을 부여해주는 센서가 내장되어 있다. 이 센서들은 문자 그대로 잉크젯 프린터가 종이에 텍스트를 인쇄하는 것과 같은 방식으로 피부에 인쇄된다. 카트리지에는 일반 잉크 대신 연구팀이 개발한 나노 물질의 다양한 잉크로 채워져 있다.

그런 다음, 은(Ag) 나노입자 와이어의 스캐폴딩(scaffolding·비계)를 인쇄한 후, 연구팀은 다양한 것들을 감지하도록 설계될 수 있는 마이크로미터 크기의 센서 층을 인쇄했다. 센서가 인쇄된다는 사실은 연구팀이 새로운 종류의 센서를 설계하고 시험하는 것을 더 빠르고 쉽게 만든다. 즉, 하나의 주어진 화합물을 탐지하고 싶을 때, 센서가 그 화합물에 대해 높은 전기화학적 반응 여부를 직접 확인하면서 진행하는 것이다.
가오 교수는 "백금이 함침(含浸)된 그래핀은 폭발성 TNT를 매우 빠르고 선택적으로 감지합니다. 바이러스의 경우, 표면적이 매우 높은 탄소 나노튜브를 인쇄하고 바이러스에 대한 항체를 부착합니다. 이것은 모두 대량 생산 가능하고 확장 가능합니다"라고 말했다.

특히, 중요한 것은 연구팀은 이 피부를 인간 사용자가 자신의 근육 움직임을 통해 로봇을 제어할 수 있도록 하는 동시에 로봇의 피부로부터 사용자 자신의 피부로 피드백을 받을 수 있는 인공지능(AI) 대화형 시스템에 결합했다.
시스템의 이 부분은 추가 인쇄 부품(이 경우 작업자의 팔뚝에 고정된 전극)을 사용한다. 이 전극은 뇌파를 측정하는 데 사용되는 전극과 유사하지만 대신 손과 손목을 움직일 때 조작자의 근육에서 생성되는 전기 신호를 감지하도록 배치한다.
연구팀은 AI 머신러닝을 사용하여 이러한 신호를 로봇 제어를 위한 제스처로 변환하고 6가지 제스처로 모델을 학습시켰다. 이를 통해 인간의 손목을 가볍게 튕기면 로봇 팔이 위아래로 움직이도록 지시하고, 인간의 손가락을 꽉 쥐거나 벌리면 로봇 손이 비슷한 동작(아래 사진 참조)을 따르게 된다.

연구팀은 이 시스템이 농업에서 보안, 위험물 취급, 환경 보호에 이르기까지 모든 분야에서 로봇 운영자가 공항에 남겨진 의심스러운 배낭에 폭발물의 흔적이 있는지, 농작물에 얼마나 많은 살충제가 적용되고 있는지 등 다양한 분야에서 적용될 수 있다고 밝혔다.
또한 연구팀 이 로봇 피부의 안정성을 개선하여 더 오래 지속되도록 하고 새로운 잉크와 새로운 재료를 최적화함으로써 이것이 다양한 종류의 표적 탐지에 사용될 수 있기를 바라며, 이를 더 강력한 로봇에 장착하고 그들은 더 똑똑하고 더 지능적이기를 기대한다고 덧붙였다.
한편, 이 연구 결과는 로보틱스 분야 세계 최고 권위의 학술지 사이언스 로보틱스(Science Robotics)에 '로봇 물리화학적 감지를 위한 전체 인쇄된 부드러운 인간-기계 인터페이스(All-printed soft human-machine interface for robotic physicochemical sensing-다운)'라는 제목으로 지난 1일 표지논문으로 게재됐다.
출처 : 인공지능신문
http://www.aitimes.kr/news/articleView.html?idxno=25212

'[IT 알아보기] > IT 소식' 카테고리의 다른 글
| [IT 소식] 미래의 애플카…내 마음대로 대시보드 바꾼다 (0) | 2022.06.08 |
|---|---|
| [IT 소식] 연골세포로 찍어냈다… 3D 프린터로 만든 귀, 이식 성공 (0) | 2022.06.08 |
| [IT 소식] 하늘길·가상동물원·로봇까지… 통신 3사 미래 ‘탈통신’에 걸었다 (0) | 2022.06.07 |
| [IT 소식] “대한민국 달 탐사 프로젝트 점화”…‘다누리’ 8월 달에 간다 (0) | 2022.06.07 |
| [IT 소식] 무거운 제주 여행 가방, 자율주행 차가 호텔로 배달한다 (0) | 2022.06.05 |